
Policy Gradients
1. 推导
已知轨迹出现的概率$p_\theta(\tau)=p(\mathbf{s}_ 1)\prod_{t=1}^T\pi_\theta(\mathbf{a}_ t|\mathbf{s}_ t)p(\mathbf{s}_{t+1}|\mathbf{s}_t,\mathbf{a}_t)$,目标函数为:
如果分布很复杂,通常采用蒙特卡洛法抽样近似。现在考虑如何改进策略。最常见的方式是优化梯度:
这个表达式的优点是:我们不需要初始状态以及转移概率,即我们可以在任意环境中直接进行抽样生成样本。接下来可以采用蒙特卡洛估计方法,流程如下:
- 运行策略$\pi_\theta(\mathbf{a}\vert \mathbf{s})$,抽取样本${\tau^i}$;
- 计算目标函数,估计梯度$\nabla_\theta J(\theta)\approx\frac{1}{N}\sum_{i=1}^N\left[\left(\sum_{t=1}^T\nabla_\theta\log \pi_\theta(\mathbf{a}_ {i,t}\vert \mathbf{s}_ {i,t})\right)\left(\sum_{t=1}^Tr(\mathbf{s}_ {i,t},\mathbf{a}_{i,t})\right)\right]$;
- 梯度上升$\theta\leftarrow\theta+\alpha\nabla_\theta J(\theta)$。 这里的$\nabla_\theta\log \pi_\theta(\mathbf{a}_t\vert \mathbf{s}_t)$与策略分布相关,如果策略网络的输出是一个高斯分布的均值-方差,那么该表达式在梯度更新时就是对高斯分布求导。
与极大似然估计
策略梯度和极大似然估计(梯度是$\nabla_\theta J_\mathrm{ML}(\theta)\approx\frac{1}{N}\sum_{i=1}^N\nabla_\theta \log p_\theta(\tau_i)$)很类似,区别在于策略梯度法尝试对不同的样本进行加权(reward函数),减少一些不好的样本的出现概率,增加其他样本的出现概率,而极大似然是增加所有样本的出现概率。
部分观测信息
如果只有部分观测信息,依然可以使用策略梯度法。注意,此时等式变成($o_{i,t}$代替$s_{i,t}$)
注意策略梯度的推导过程中转移概率不起作用,因此算法不需要具备马尔可夫性,其他算法不能这么使用。通常不能保证得到一个很好的策略,但能在策略簇中找到一个不错的策略。
2. 算法存在的问题
问题一:高方差问题
理论上,收益值(一个期望)加上一个常数不会影响实际策略。然而,在采样有限的情况下,实际策略会因此而改变,这是因为有限采样造成的高方差。
解决方法一:因果关系
我们把$\hat{Q}_ {i,t}=\sum_{t’=t}^Tr(\mathbf{s}_ {i,t’},\mathbf{a}_{i,t’})$记作今后收益(reward-to-go),这是因为当前策略只会影响之后收益。这样做,累加和的个数减少了,方差也随之减小(因为更接近真实情况)。
解决方法二:基准线(baseline)
对于$\nabla_\theta J(\theta)=\mathbf{E}_ {\tau\sim p_\theta(\tau)}[\nabla_\theta \log p_\theta(\tau)r(\tau)]$,正如之前所述,采样的有限性导致表达式对收益值很敏感。因此我们不想考察轨迹自身有多好,而是它比平均好多少,可以修改为$\nabla_\theta J(\theta)=\mathbf{E}_ {\tau\sim p_\theta(\tau)}[\nabla_\theta \log p_\theta(\tau)(r(\tau)-b)]$。有限采样时,常数不影响期望,却影响方差。如何选取一个理论上最优的常数?只要使得方差最小即可。将表达式带入方差公式$\text{Var}[X]=\mathbf{E}[X^2]-\mathbf{E}[X]^2$并对b求导数,令$g(\tau):=\nabla_\theta \log p_\theta(\tau)$,得到最优常数$b^*=\frac{\mathbf{E}[g(\tau)^2 r(\tau)]}{\mathbf{E}[g(\tau)^2]}$。这个常数计算比较复杂,不如直接使用收益值的期望。(注:此处证明了存在最佳常数baseline,下一讲会介绍最佳baseline是与state相关的)
问题二:natural gradient
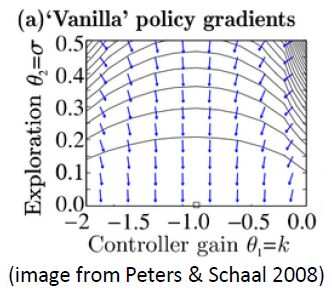
假设对数策略函数是一个高斯分布,形式是$\log\pi_\theta(\mathbf{a}_t|\mathbf{s}_t)=-\frac{1}{2\sigma^2}(k\mathbf{s}_t-\mathbf{a}_t)^2+\text{const}$,收益函数$r(\mathbf{s}_t,\mathbf{a}_t)=-\mathbf{s}_t^2-\mathbf{a}_t^2$。使用策略梯度法时,梯度法总会倾向于减小$\sigma$,更小的$\sigma$,更倾向于让我们进一步减少$\sigma$,导致$\sigma$会快速下降,然后逐渐地$k$就不动了。
3. 离线的策略梯度法
策略梯度法是on-policy算法,因为表达式中$\nabla_\theta J(\theta)=\mathbf{E}_ {\tau\sim p_\theta(\tau)}[\nabla_\theta \log p_\theta(\tau)r(\tau)]$求期望时需要从当前分布上进行采样,意味着每次网络更新后都需要重新采样,训练会非常慢。假设有一堆从分布$\hat{p}(\tau)$中采样的数据,如何用这些数据去估计。
重要性采样(importance sampling): $\mathbf{E}_ {x\sim p(x)}[f(x)]=\int p(x)f(x)\mathrm{d}x=\int q(x)\frac{p(x)}{q(x)}f(x)\mathrm{d}x=\mathbf{E}_ {x\sim q(x)}\left[\frac{p(x)}{q(x)}f(x)\right]$
新的目标函数变成$J(\theta)=\mathbf{E}_ {\tau\sim \hat{p}(\tau)}\left[\frac{p_\theta(\tau)}{\hat{p}(\tau)}r(\tau)\right]$,其中$\frac{p_\theta(\tau)}{\hat{p}(\tau)}=\frac{p(\mathbf{s}_ 1)\prod_{t=1}^T\pi_\theta(\mathbf{a}_ t\vert \mathbf{s}_ t)p(\mathbf{s}_ {t+1}\vert \mathbf{s}_ t,\mathbf{a}_ t)}{p(\mathbf{s}_ 1)\prod_{t=1}^T\hat{\pi}(\mathbf{a}_ t\vert \mathbf{s}_ t)p(\mathbf{s}_ {t+1}\vert \mathbf{s}_ t,\mathbf{a}_ t)}=\frac{\prod_{t=1}^T\pi_\theta(\mathbf{a}_ t\vert \mathbf{s}_ t)}{\prod_{t=1}^T\hat{\pi}(\mathbf{a}_ t\vert \mathbf{s}_ t)}$。对于新参数$\theta’$,$J(\theta’)=\mathbf{E}_ {\tau\sim p_\theta(\tau)}\left[\frac{p_{\theta’}(\tau)}{p_{\theta}(\tau)}r(\tau)\right]$,于是梯度更新公式变成:
最后一步假如因果关系进行修正。如果忽略最后一项连乘,就是策略迭代法,以后会讲????这部分存在新问题,即中间的连乘部分会导致值过小的问题,解决办法是将目标函数写成边际分布情况下求期望的形式:
这样可以在两个层面上做重要性抽样了:
但这样又碰到新问题,即$p_{\theta’}(\mathbf{s}_ t)$无法求解。通常省略掉$\frac{p_{\theta’}(\mathbf{s}_ t)}{p_{\theta}(\mathbf{s}_t)}$,理论上会导致有偏差,但实际效果还不错,因为两个策略足够接近时,这个比值不重要。以后会讲????
4. 用自动求导做策略梯度法
目标函数的梯度为$\nabla_\theta J(\theta)\approx\frac{1}{N}\sum_{i=1}^N\sum_{t=1}^T\left[\nabla_\theta\log \pi_\theta(\mathbf{a}_ {i,t}\vert \mathbf{s}_ {i,t})\hat{Q}_ {i,t}\right]$。为了方便使用TensorFlow,可以构造损失函数$\tilde{J}(\theta)\approx\frac{1}{N}\sum_{i=1}^N\sum_{t=1}^T\log \pi_\theta(\mathbf{a}_ {i,t}\vert \mathbf{s}_ {i,t})\hat{Q}_ {i,t}$,$\hat{Q}_{i,t}$当成是权重,然后就可以自动求导。on-policy方法需要每更新一次梯度都进行重新采样,因此不能使用SGD。
实际使用时,由于方差较大,处理监督学习的一些技巧不一定适用。batch-size设置得越大越好。学习率的调整很有挑战性,ADAM通常是可行的。
总结
- $\nabla_\theta J(\theta) = \mathbf{E}_ {\tau\sim p_\theta(\tau)}\left[\left(\sum_{t=1}^T\nabla_\theta\log \pi_\theta(\mathbf{a}_ t\vert\mathbf{s}_ t)\right)\left(\sum_{t=1}^Tr(\mathbf{s}_t,\mathbf{a}_t)\right)\right]$
- 步骤:
- 运行策略$\pi_\theta(\mathbf{a}\vert \mathbf{s})$,蒙特卡洛采样抽取样本${\tau^i}$;
- 计算目标函数,估计梯度$\nabla_\theta J(\theta)\approx\frac{1}{N}\sum_{i=1}^N\left[\left(\sum_{t=1}^T\nabla_\theta\log \pi_\theta(\mathbf{a}_ {i,t}\vert \mathbf{s}_ {i,t})\right)\left(\sum_{t=1}^Tr(\mathbf{s}_ {i,t},\mathbf{a}_{i,t})\right)\right]$;
- 梯度上升$\theta\leftarrow\theta+\alpha\nabla_\theta J(\theta)$。这里的$\nabla_\theta\log \pi_\theta(\mathbf{a}_t\vert \mathbf{s}_t)$与策略分布相关,如果策略网络的输出是一个高斯分布的均值-方差,那么该表达式在梯度更新时就是对高斯分布求导。
- 特点:
- 不需要初始状态以及转移概率,即我们可以在任意环境中直接进行抽样生成样本
- on-policy,导致数据利用率低
- 存在问题:
- 有限采样导致高方差问题(收益值加上常数会引起策略变化)
- 解决:
- 因果关系:当前策略不影响以前的reward函数,接近真实情况;
- baseline:收益值统一减去一个常数(如收益的平均)
- off-policy改进:
- 直接重要性采样:会产生连乘,使梯度接近0
- 对边际分布形式的目标函数进行两层重要性采样
- 实际中:梯度方差大,增大batch-size,用adam
- 网络:$s_i$输入网络$\pi$,根据输出分布得到(或随机选择)$a_i$,$r_i$,将$(s_i,a_i,r_i)$作为一组数据训练网络,网络会倾向于生成$r_i$较高的那种$a_i$。
